Bernadette Bucher

About
I am an Assistant Professor in the Robotics Department (primary) and Computer Science and Engineering Department at University of Michigan. I lead the Mapping and Motion Lab which studies robot learning and computer vision.
Previously, I have worked at the Boston Dynamics AI Institute, NVIDIA Research, and Lockheed Martin Corporation. I received my PhD in computer science in the GRASP lab at University of Pennsylvania co-advised by Dr. Kostas Daniilidis and Dr. Nikolai Matni. I received an M.A. in Mathematics, M.A. in Economics, and B.S. in Mathematics and Economics from The University of Alabama in 2014.
For more biographical details, please see my CV.
Publications

An Dang, Jayjun Lee,
Mustafa Mukadam, X. Alice Wu, Bernadette Bucher,
Manikantan Nambi, Nima Fazeli.
HydroShear: Hydroelastic Shear Simulation for Tactile Sim-to-Real Reinforcement Learning.
RSS, 2026.
arXiv / project page / code / bibtex
Jianing Qian, Qinhe Peng,
Emmanuel Panov, Leonor Fermoselle, Dinesh Jayaraman*,
Bernadette Bucher*, Tarik Kelestemur*.
Expanding Spatial and Temporal Context for Robotic Imitation Learning With Scene Graphs.
CVPR, 2026.
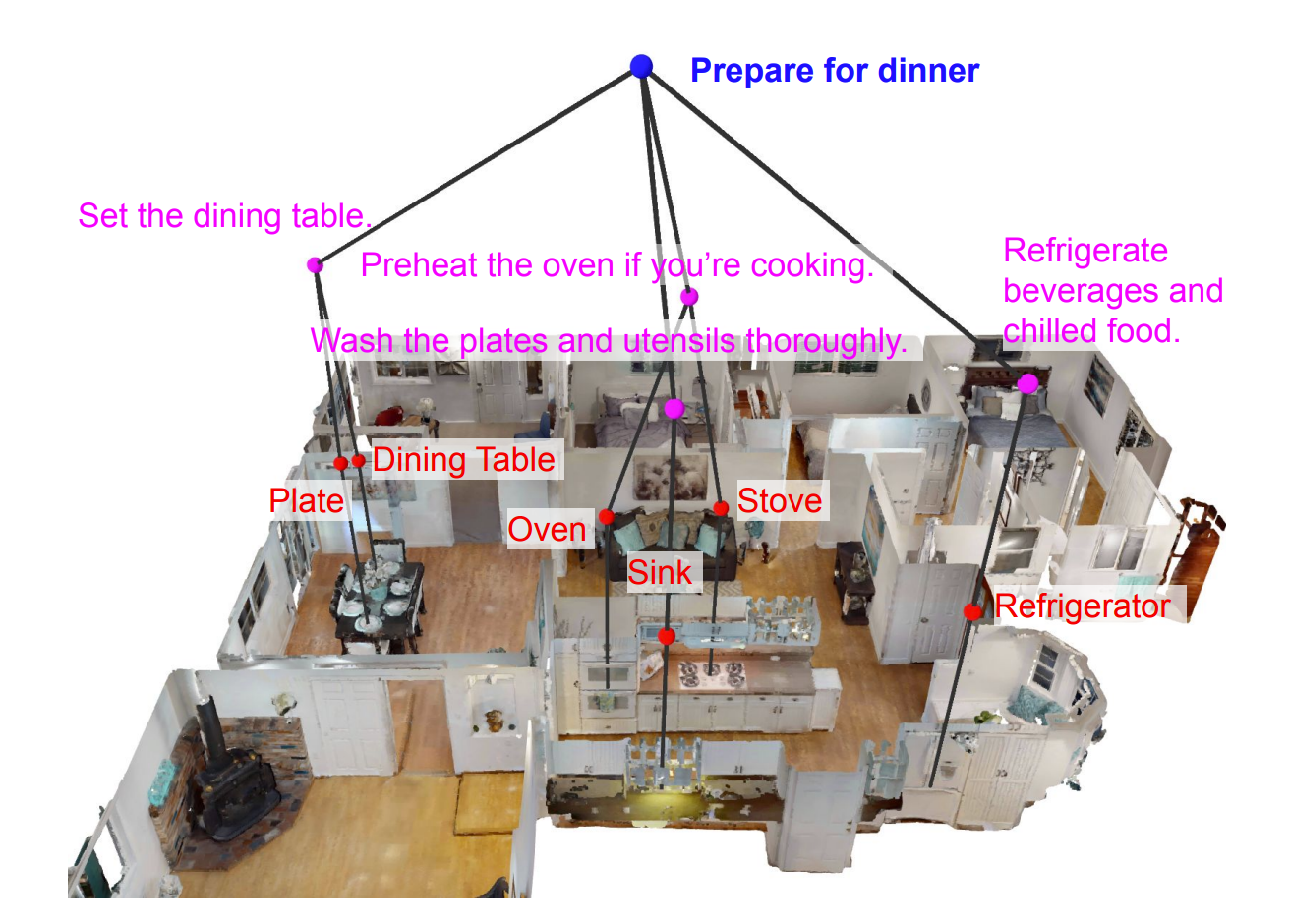
Yun Chang,
Leonor Fermoselle, Duy Ta, Bernadette Bucher,
Luca Carlone,
Jiuguang Wang.
ASHiTA: Automatic Scene-grounded HIerarchical Task Analysis.
CVPR, 2025.
Jianing Qian,
Yunshuang Li, Bernadette Bucher,
Dinesh Jayaraman.
Task-Oriented Hierarchical Object Decomposition for Visuomotor Control.
CoRL, 2024.
arXiv / project page / bibtex
Russell Mendonca, Emmanuel Panov, Bernadette Bucher, Jiuguang Wang, Deepak Pathak.
Continuously Improving Mobile Manipulation with Autonomous Real-World RL.
CoRL, 2024.
arXiv / project page / bibtex
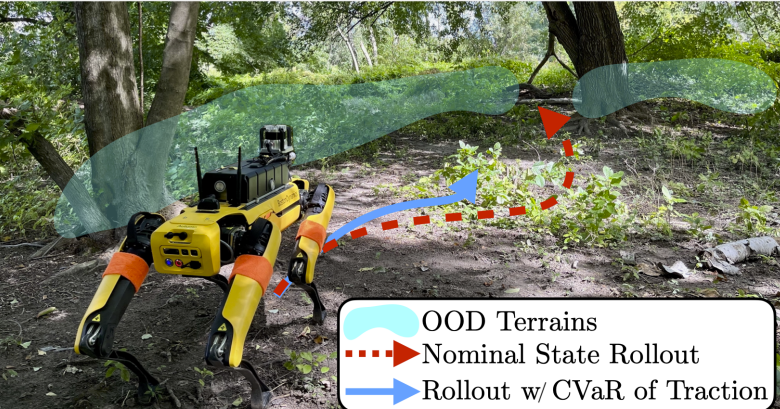
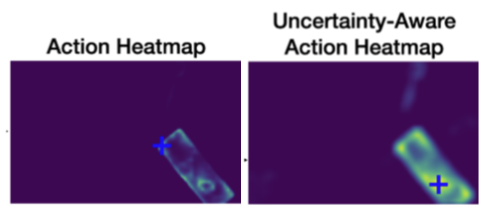
Xiaoyi Cai, Siddharth Ancha,
Lakshay Sharma, Philip R. Osteen,
Bernadette Bucher, Stephen Phillips, Jiuguang Wang,
Michael Everett, Nicholas Roy, Jonathan P. How.
EVORA: Deep Evidential Traversability Learning for Risk-Aware Off-Road Autonomy.
T-RO, 2024
CoRL Workshop Towards Reliable and Deployable Learning-based Robotic Systems, 2023.
arXiv / project page / bibtex
Bo Wu, Bruce Lee, Kostas Daniilidis, Bernadette Bucher,
Nikolai Matni.
Uncertainty Aware Deployment of Pre-trained Task Conditioned Imitation Learning Policies.
IROS, 2024.
CoRL Workshop on Out-of-Distribution Generalization in Robotics Towards Reliable Learning-Based Autonomy, 2023.

Naoki Yokoyama, Sehoon Ha, Dhruv Batra,
Jiuguang Wang, Bernadette Bucher.
VLFM: Vision-Language Frontier Maps for Zero-Shot Semantic Navigation.
Best Paper in Cognitive Robotics at ICRA 2024. 1 of 3,937 submissions (0.025%).
CoRL Workshop on Language and Robot Learning, 2023.
arXiv / project page / bibtex
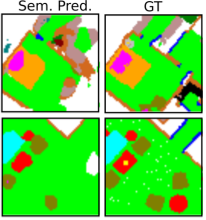
Georgios Georgakis*,
Bernadette Bucher*,
Karl Schmeckpeper,
Siddharth Singh,
Kostas Daniilidis.
Learning to Map for Active Semantic Goal Navigation.
ICLR, 2022.
arXiv / project page / code / bibtex
Frederik Ebert,
Yanlai Yang,
Karl Schmeckpeper,
Bernadette Bucher,
Georgios Georgakis,
Kostas Daniilidis,
Chelsea Finn,
Sergey Levine.
Bridge Data: Boosting Generalization of Robotic Skills with Cross-Domain Datasets.
RSS, 2022.
NeurIPS Workshop on Deep Reinforcement Learning, 2021.
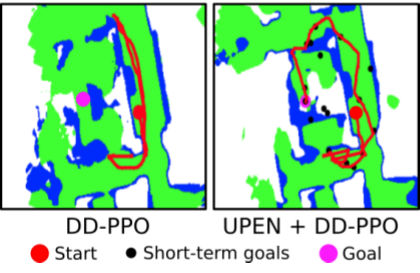
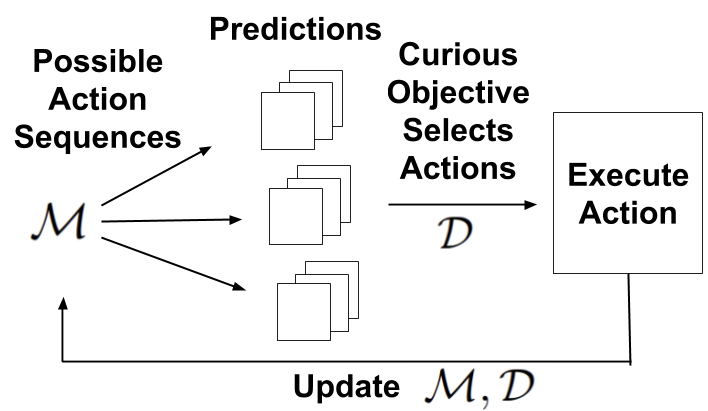
Georgios Georgakis,
Bernadette Bucher,
Anton Arapin,
Karl Schmeckpeper,
Nikolai Matni,
Kostas Daniilidis.
Uncertainty-driven Planner for Exploration and Navigation.
ICRA, 2022.
arXiv / project page / code / bibtex
Bernadette Bucher*,
Karl Schmeckpeper*,
Nikolai Matni,
Kostas Daniilidis.
An Adversarial Objective for Scalable Exploration.
IROS, 2021.
arXiv / project page / code / bibtex

Sudeep Dasari,
Frederik Ebert,
Stephen Tian,
Suraj Nair,
Bernadette Bucher,
Karl Schmeckpeper,
Siddharth Singh,
Sergey Levine,
Chelsea Finn.
RoboNet: Large-Scale Multi-Robot Learning.
CoRL, 2019.
NeurIPS Workshop on Deep Reinforcement Learning, 2019.
arXiv / project page / code / bibtex